Paper Walkthrough — Matrix Calculus for Deep Learning (Part 1 / 2)
Time and time again I find myself learning and forgetting matrix calculus, essentially getting nowhere. So I thought to myself, this time I’d try teaching it through a blog post and see if that helps cement my knowledge. Additionally like Rachel Thomas says, any email that’s written twice should be a blog post. While I am yet to see Matrix Calculus discussed on emails, it has taken up enough time and mental parking space to warrant a post of its own.
This walkthrough will take you through the paper, “The Matrix Calculus You Need For Deep Learning” by Terence Parr and Jeremy Howard. The intended audience is someone who wishes to get their feet wet with DL (Deep Learning) math, primarily, people like me, who learn and forget.
I assume that readers will be familiar with:
- The foundations of Neural Networks, such as what are neurons, what are weights and biases, ReLU etc.(reference).
- Basic differentiation and the concept of partial derivatives.
Affine Transformation
Think about the equation for a straight line, with the independent variable y and the dependent variable x:

The output of a single neuron in a neural network is given by something similar to the above Eq.1:

So far, so good. An affine transformation is simply a linear equation of weights and biases. The output z(x) is fed to an activation function, the ReLU (Rectified Linear Unit). This activation(x) is optimized to choose values for the weights and biases, (w and b) such that we get the lowest error possible.

We need to generalize the above equation such that we can optimize the weights and biases of all the neurons in the network to give the lowest possible error. However, we cannot do this one by one for each neuron.
Instead, we could have a matrix of weights and a matrix of the biases, which we then differentiate and equate to 0, to find out the values of the weights and biases for which the loss is the lowest.
However, we cannot use normal differentiation when we differentiate a matrix. This is where the gradient comes in.
Gradients
The gradient of a function is simply the matrix of its partial derivatives.

Consider a function f(x, y) = 10x²y². The gradient of this function would be:

Gradients are all well and good, but it doesn’t end there. In the above case f(x, y) was a scalar function. But what if f(x, y) was a vector function instead? What if f(x, y) looked like this instead:

To deal with this, we need to use the jacobian.
Jacobian
A Jacobian is nothing but a stack of gradients. Overly simply, we can just place gradients on top of each other to get the jacobian. Say we have a vector function, which is in turn made up of two scalar functions f(x, y) and g(x, y):

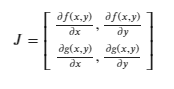
The above Jacobian uses the numerator layout (the partial derivatives of the scalar components are listed in the same row). The denominator layout is just the transpose of the numerator layout.
Generalization of the Jacobian
Consider a column vector x, of size n, i.e. |x| = n.

The individual elements of x, x₁, x₂….. are scalars.
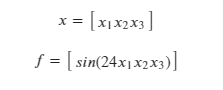
For instance:
Say n = 3, in the above generalization.
This is a 3D vector along perpendicular axes. This vector would be constructed by travelling x₁, x₂ and x₃ units along their respective axes. This implies that x₁, x₂ and x₃ are scalars.
If you are a victim of how vectors are introduced in Physics ( a la India ), this vector x would be -
Generalization ramp-up
Say we have a vector y, such that y = f(x), where:
- x is a vector of size n.
- y is a vector of m scalar valued functions.
Let’s consider m = n = 3.
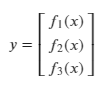
y is some function of x.
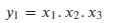
y₁ = f₁(x), which means that y₁ will be some function of x₁, x₂ and x₃.
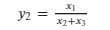
Let’s define y₁, y₂ and y₃ as follows:

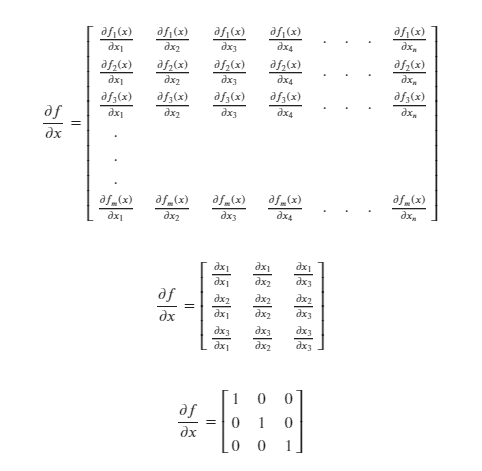
Then the Jacobian of y will be (remember that the Jacobian is simply a stack of the gradients):
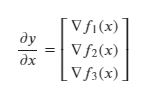
Now, recall that the gradient is simply the matrix of all the partial derivatives:
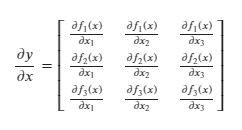
We now have a 3 x 3 square Jacobian matrix for this specific case where 𝑥 and 𝑦 both had 3 elements each.
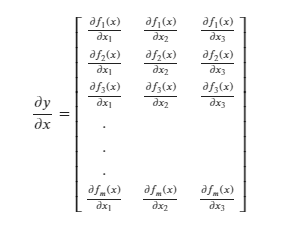
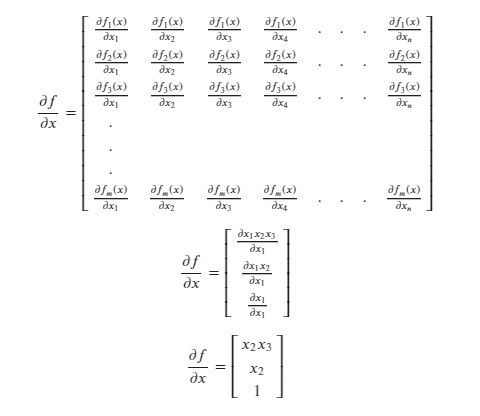
If we consider a more general 𝑦 with m elements:
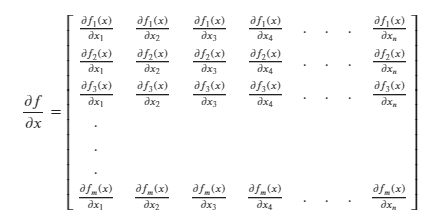
Considering a more general 𝑥. When 𝑥 had 3 dimensions, we had 3 partial derivatives for every scalar function in 𝑦. When 𝑥 has n dimensions, we will have n partial derivatives for every scalar function in 𝑦:

The Jacobian is the stack of gradients of a function / vector.
Therefore, we can say that the Jacobian is stack of the all the possible partial derivatives of a vector.
In the above generalized case, the Jacobian is a 𝑚 X 𝑛 matrix.
Each row in the Jacobian is horizontal 𝑛 sized vector.
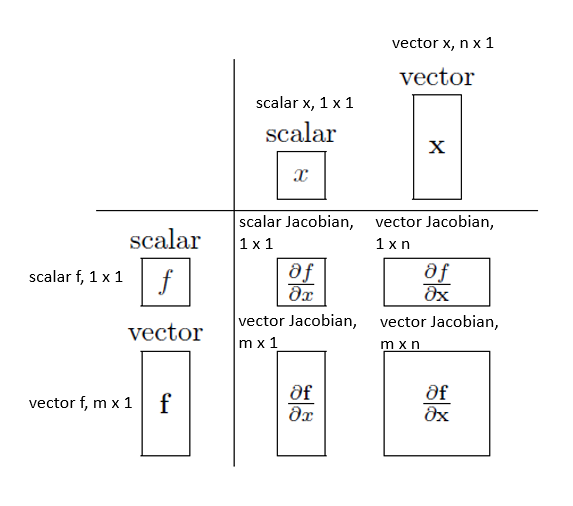
Jacobian — Analyzing a few cases
For all cases, y = f.
Case 1
Say both f and 𝑥 are scalar. Consider,
We know that the Jacobian is the stack of gradients of a vector:
But in this case, both f and 𝑥 are scalar, i.e. they are 1x1 matrices. So, the above formula reduces to:
In this case, when f and 𝑥 are both scalar, the Jacobian is also a scalar.
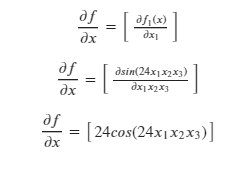
Case 2
Say f is a scalar and 𝑥 is a vector.
x is no longer a 1x1 matrix. Consider:
Solving for the Jacobian:
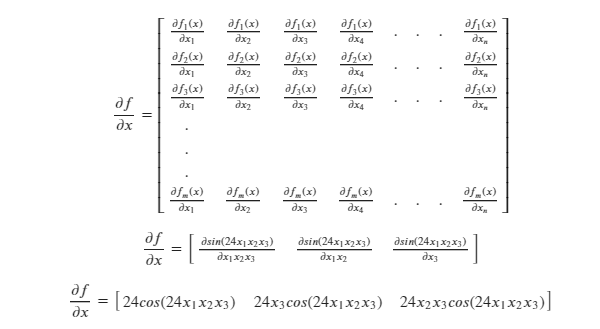
The Jacobian is a matrix in this case, whose dimensions are the transpose of the dimensions of 𝑥.
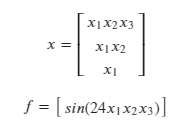
Case 3
Say 𝑓 is a vector and 𝑥 is a scalar:

Solving for the Jacobian:
In this case, the Jacobian is a matrix whose dimensions are the same as the dimensions of 𝑓.
Case 4
Say 𝑓 and 𝑥 are both vectors.

Solving for the Jacobian:
In this case the Jacobian is a 𝑚 X 𝑛 matrix where 𝑚 and 𝑛 are dimensions of 𝑓 and 𝑥 respectively.
Summary
To sum up all of the cases mentioned above:
That brings us to the end of this post. In the next post in this series, we’ll continue looking at the rest of this paper. Do reach out if you have any comments, questions or suggestions.
Do check out Part 2 of the series.
